Portfolio
Below are the projects I have led, showcasing my work in robotic prosthetics and advanced wearable robotics.
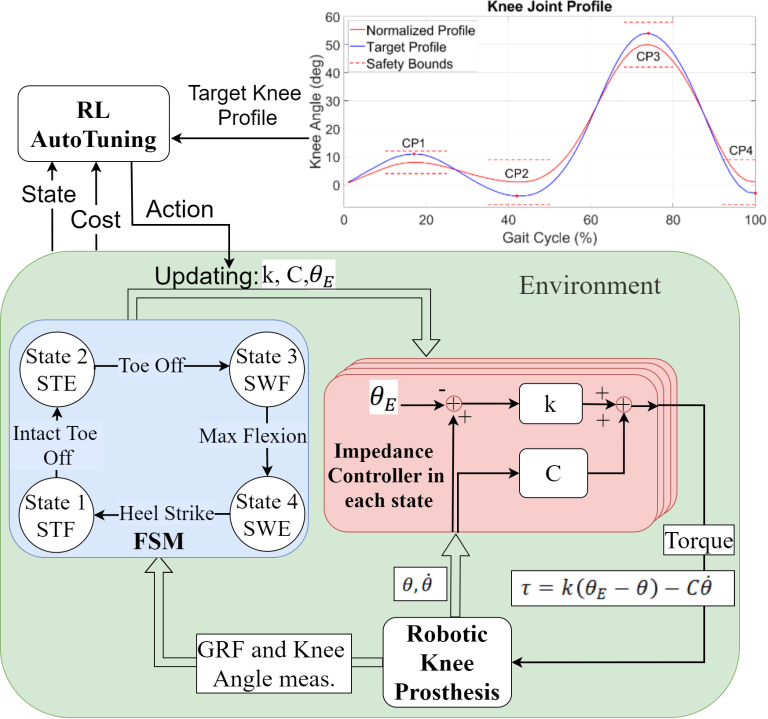
Personalized Robotic Prosthesis Tuning with Reinforcement Learning
Project 1: Robotic Prosthesis Tuning with Reinforcement Learning
This project focuses on developing an automatic tuning algorithm using reinforcement learning (RL) for a knee prosthesis, aiming to overcome the challenges of manual tuning methods. The algorithm optimizes control parameters to match desired knee joint profiles during gait, significantly reducing tuning time. An intuitive interface allows users and clinicians to select preferred knee profiles, and the algorithm’s effectiveness was validated with two able-bodied subjects, achieving convergence in an average of 1.15 and 2.31 minutes respectively. The study demonstrates the necessity of personalized tuning to accommodate different user preferences and discusses the broader implications for the tuning of robotic prosthetic devices.
Project 2: User-Centric Tuning Framework for Robotic Knee Prosthesis
This project introduces a novel tuning framework that combines a User-Controlled Interface with a reinforcement learning-based algorithm to enhance the personalization of robotic knee prostheses. The interface allows users to select their preferred knee kinematics, and the algorithm efficiently tunes high-dimension control parameters to meet these preferences. The framework’s performance and usability were validated, showing effective tuning of 12 control parameters. Amputee users were able to differentiate and consistently select their preferred knee kinematics in a blinded comparative study. Preliminary gait biomechanics analysis revealed no significant differences between walking with preferred and normative control parameters. This study provides valuable insights for the future application of this tuning framework in both home and clinical settings.
Innovating Balance and Gait Control with Advanced Robotic Hip Exoskeletons
Project 1: Enhancing Mediolateral Balance with Powered Hip Exoskeletons
Our latest project explores the potential of using a bilateral powered hip exoskeleton to improve mediolateral balance during walking by modulating step width. Through innovative admittance control, the exoskeleton assists in hip abduction and adduction, effectively altering step width without impacting step length. Ten non-disabled individuals participated in treadmill walking tests, revealing significant changes in step width in response to varied stiffness settings. This research paves the way for advanced wearable robotics aimed at enhancing stability for individuals with balance impairments.
Project 2: Closed-Loop Control for Enhancing Gait Stability with a Robotic Hip Exoskeleton
In this innovative project, we developed a closed-loop feedback control system for a mediolaterally acting robotic hip exoskeleton to regulate human step width during walking. By employing a PID controller based on a linearized 2nd order model of the hip joint, we successfully modulated step width through the adjustment of admittance control parameters. This system demonstrated an average step width regulation error of just 1.2 cm, showcasing its potential for improving gait stability in individuals with neurological impairments, the elderly, and amputees. The study highlights the feasibility of real-time step width control and paves the way for advanced assistive and rehabilitation applications.
Below are the projects I have collaborated, showcasing my work in robotic prosthetics and advanced wearable robotics.
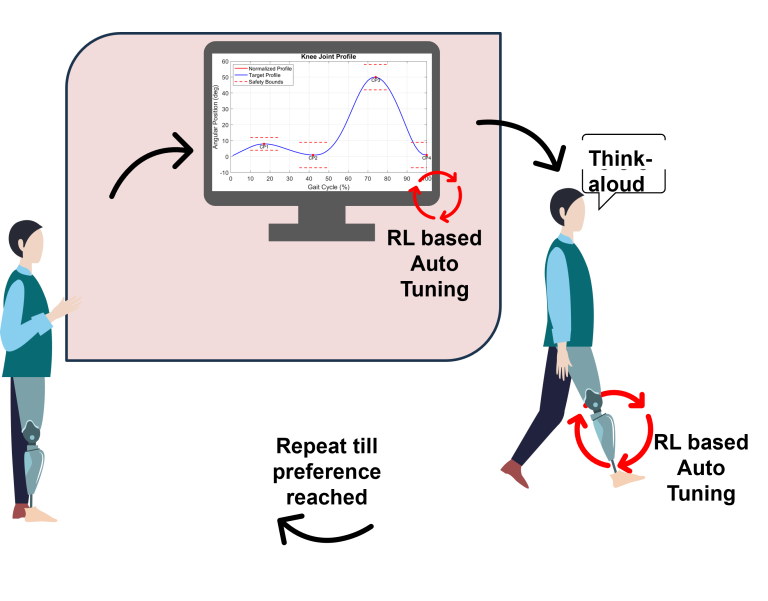
Understanding and Enhancing Prosthesis User Preferences through Advanced Tuning Techniques
Our recent projects focus on exploring and improving the personalization of lower-limb prostheses using advanced tuning methodologies. In “Understanding the Preferences for Lower-Limb Prosthesis,” we utilized a think-aloud study during user-guided auto-tuning to uncover the factors influencing user preferences, revealing key insights into physical perception and subjective feelings. In “Finding a Natural Fit,” a thematic analysis of amputees’ preferences during user-guided auto-tuning highlighted the importance of allowing users to adjust settings themselves, ensuring the prosthetic devices meet their daily functional needs and preferences.
Advanced Wearable Robotic Systems for Neuro-Rehabilitation and Mediolateral Balance Enhancement
Our work focuses on developing cutting-edge wearable robotic rehabilitation systems aimed at enhancing mediolateral balance, particularly for individuals with motor deficits and those recovering from stroke. We have created a neurorehabilitation platform that integrates a wearable robotic hip exoskeleton with a visual feedback interface. Preliminary studies on non-disabled subjects demonstrated the system’s ability to improve motion consistency and interlimb coordination, showcasing its potential for personalized rehabilitation protocols to enhance stability and reduce fall risks in affected populations.